前言
有了前面ReentrantLock-NonfairSync源码逐行深度分析的基础,理解公平锁FairSync的实现就很简单了。
一、公平的实现
ReentrantLock的默认构造函数创建的是非公平锁,同时提供了布尔类型的有参构造函数,true表示创建公平锁。
public ReentrantLock() {
sync = new NonfairSync();
}
public ReentrantLock(boolean fair) {
sync = fair ? new FairSync() : new NonfairSync();
}
在前文中我们已经分析过,使用ReentrantLock加锁其实是调用的内部sync.lock()方法,lock()方法在FairSync和NonfairSync中都有实现,本文主要看看FairSync,也就是公平锁中的lock方法:
static final class FairSync extends Sync {
final void lock() {
acquire(1);
}
}
这里已经看到和非公平锁不一样的地方了,非公平锁在lock的时候,会首先去竞争锁,竞争失败才会调用acquire方法。而在此处公平锁的实现中并没有直接就去获取锁,为了对比,这里再贴一下NonfairSync的lock方法:
static final class NonfairSync extends Sync {
final void lock() {
//首先尝试去或获取锁
if (compareAndSetState(0, 1))
setExclusiveOwnerThread(Thread.currentThread());
else
acquire(1);
}
}
acquire方法定义在父类AQS中,首先是调用tryAcquire方法尝试获取锁,失败则调用addWaiter方法将线程包装为Node。然后自旋CAS入队,接着在acquireQueued方法中完成线程的阻塞:
public abstract class AbstractQueuedSynchronizer
extends AbstractOwnableSynchronizer
implements java.io.Serializable {
public final void acquire(int arg) {
if (!tryAcquire(arg) &&
acquireQueued(addWaiter(Node.EXCLUSIVE), arg))
selfInterrupt();
}
}
其中的所有方法调用在前文已经详细分析过,这里就不再赘述,我们主要关注tryAcquire方法。tryAcquire方法在AQS中是一个空方法,由具体的子类重写实现逻辑,当然此处我们看FairSync中的实现:
static final class FairSync extends Sync {
protected final boolean tryAcquire(int acquires) {
//获取当前线程
final Thread current = Thread.currentThread();
//获取state
int c = getState();
if (c == 0) {
//发现没有线程持有锁
//调用hasQueuedPredecessors函数判断队列中是否有优先于此线程的排队线程
//如果没有才去尝试竞争锁
if (!hasQueuedPredecessors() &&
compareAndSetState(0, acquires)) {
setExclusiveOwnerThread(current);
return true;
}
}
else if (current == getExclusiveOwnerThread()) {
//锁重入
int nextc = c + acquires;
if (nextc < 0)
throw new Error("Maximum lock count exceeded");
setState(nextc);
return true;
}
return false;
}
}
可以看到这里的逻辑和NonfairSync唯一的区别就是FairSync多了hasQueuedPredecessors函数的调用,在竞争锁之前需要先看队列中是否有优先于此线程的排队线程,如果有的话,那么FairSync不会去竞争锁,而是直接进入后面入队阻塞的逻辑。那么这里强调的优先于此线程的排队线程是什么意思呢?因为FairSync是公平锁的实现,获取锁总要有个先来后到。
二、hasQueuedPredecessors函数
接着我们来看看hasQueuedPredecessors函数的实现,该函数也定义在AQS中:
public final boolean hasQueuedPredecessors() {
Node t = tail;
Node h = head;
Node s;
return h != t && ((s = h.next) == null || s.thread != Thread.currentThread());
}
虽然这个方法代码很少,但是细节点可一点儿不少,首先我们来关注最后一条返回语句:
return h != t && ((s = h.next) == null || s.thread != Thread.currentThread());
可以看到,如果 h != t,那么会进入后面的条件判断,会调用h.next。这里考虑一个问题,在h != t的情况下,h可不可能为null?也就是h.next可不可能抛出空指针异常?
我们先从语法层面上分析一下,要在h != t 为true的情况下使得h为null,那么t就不能为null,也就是要考虑会不会出现head == null,但是tail != null的情况。
要从理论上看待这个问题,就需要回顾一下线程入队的逻辑,也就是enq方法:
private Node enq(final Node node) {
for (;;) {
Node t = tail;
if (t == null) {
//初始化CLH队列
if (compareAndSetHead(new Node()))
tail = head;
} else {
node.prev = t;
if (compareAndSetTail(t, node)) {
t.next = node;
return t;
}
}
}
}
这个方法在前文已经详细分析过,就不细说了,这里我们要关注在初始化CLH队列的时候是先通过CAS设置了head节点,然后将head赋值给tail,注意这是两步操作,也就是非原子的。有可能一个线程t0执行CAS设置了head节点,但是在设置tail节点之前时间片用完了,轮到执行hasQueuedPredecessors方法的线程t1,那么此时t1去获取head和tail节点,就可能得到head不为空,但是tail为空的情况。不过,由于t1线程在hasQueuedPredecessors方法中是先获取的tail,再获取的head,而t0线程在enq方法中是先设置head,再设置tail,所以不论t1线程在什么时候运行,只要获取的tail不为null,那么head一定不为null,也就是不可能出现head == null,但是tail != null的情况。
那现在回过头来试想一下,如果先获取head,再获取tail会不会有什么问题?贴个图就能明白了:
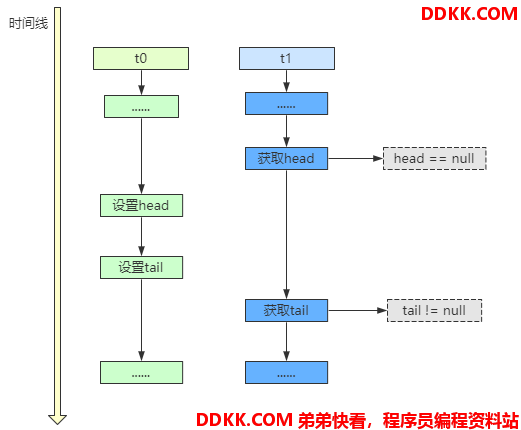
在上图的场景中,t1先获取head,此时为null,时间片耗尽,然后t0线程运行设置head和tail,然后t1线程恢复获取tail,此时不为null。这就出现了head == null,但是tail != null的情况,那么以下语句就会出现空指针异常:
return h != t && ((s = h.next) == null || s.thread != Thread.currentThread());
所以基于这条判断语句,获取head和tail的顺序要和其初始化的顺序相反,才能保证不出异常,并且head和tail都被volatile修饰,即保证了可见性,也保证了不会被指令重排影响执行顺序。基于这样获取顺序,h(head)和t(tail)只可能是以下几种情况:
- h == null and t == null
- h != null and t != null
- h !=null and t == null
然后我们再回过头来看这个条件判断语句,要表达的意思其实很简单:如果CLH队列中有排队线程,并且首个排队线程不是当前线程,那么方法需要返回true,表示有优先级比当前高的线程正在排队。
但是这里需要注意一个点,就是(s = h.next) == null这个条件判断是什么意思呢?既然CLH队列中有排队线程,那么h.next肯定是有节点才对啊?其实这个条件对应的就是我们前面提到的,由于线程穿插执行导致的,h != null,但是t == null的情况。如果出现这个情况,那么h.next就为null,因为前一个线程正在入队,但是还没有入队,当然也表示前面有线程优先级更高,只是还没有入队。也就是 h != t成立之后,有两种情况:
- h !=null and t == null:此时h.next == null,表示已经有线程正在入队,但还未入队
- h != null and t != null:此时表示CLH队列中已经有了排队线程,只需要判断h.next.thread是否为当前线程即可
所以这个hasQueuedPredecessors方法可以改写成:
public final boolean hasQueuedPredecessors() {
//先获取tail,再获取head,可以避免得到 h ==null,但是t != null的情况
Node t = tail;
Node h = head;
if(h != null && t == null){
//线程交叉执行,可能导致这个情况,但是此时表明前面已经有线程正在入队
return true;
}
if(h != null && t != null){
//队列中已经有排队线程
return s.thread != Thread.currentThread();
}
if(h == null && t == null){
//队列为空,当前线程可以尝试去竞争锁
return false;
}
}
2.1 返回值并不可靠
2.1.1 返回true不可靠
由于一个线程随时可能被中断唤醒或者超时唤醒,比如我们调用的lockInterruptibly方法获取锁(这个方法在前面的文章也详细介绍过了),阻塞线程一旦被中断,那么在醒来后会立即抛出异常,然后在finally代码块中的cancelAcquire方法中移除该节点,但是在这个方法逻辑还没有完成的时候(准确来说应该是被移除节点可能还没有真正被移除:队列中只有一个排队线程,移除的逻辑是通过CAS修改指针完成的,详情参考前面文章),那此时新来一个线程调用hasQueuedPredecessors返回的还是为true,表示前面有优先级更高的排队节点,虽然它已经是个无效节点。
2.1.2 返回false不可靠
现在考虑这样一种情况,两个线程同时准备竞争锁,都调用了hasQueuedPredecessors,此时CLH队列还没有初始化,连head节点都没有,所以都会得到head==null,并且tail==null的结果,返回false,那么它们都会尝试去通过CAS修改state,这个时候哪个线程获取到锁就是未知数了,即使两个线程有先后顺序。
三、总结
可以看到公平锁相对于非公平锁的区别主要就是多了hasQueuedPredecessors方法的调用,尽可能的保证线程按照先来后到去获取锁。而从这个简单hasQueuedPredecessors方法都能看到Doug Lea有多细~