查找
基本概念
查找就是在数据集中找出一个“特定元素”。
查找表是由同一类型的数据元素(或记录)构成的集合。
查找表是一种以集合为逻辑结构、以查找为核心的数据结构。
关键字
有时候我们需要指定某数据项的值来查找,这就用到了关键字。
关键字是数据元素中某个数据项的值,用以标识一个数据元素。
若此关键字可以识别唯一的一个记录,则称之谓“主关键字”;若此关键字能识别若干记录,则称之谓“次关键字”。
例:

对查找表经常进行的操作:
1)查询某个“特定的”数据元素是否在查找表中;
2)检索某个“特定的”数据元素的各种属性;
3)在查找表中插入一个数据元素;
4)从查找表中删去某个数据元素。
查找表可分为两类:
静态查找:仅作查询和检索操作。查找前后查找表未发生变化。
动态查找:在查询之后,将 “不在查找表中”的数据元素插入到查找表中;或者,从查找表中删除“在查找表中”的数据元素。 查找前后查找表发生了变化。
采用何种查找方法,取决于使用哪种数据结构来表示“查找表”。即表中记录是按何种方式组织的,根据不同的数据结构采用不同的查找方法。
平均查找长度:
查找算法中的基本运算是记录的关键字与给定值所进行的比较。其执行时间通常取决于关键字的比较次数,也称为平均查找长度ASL 。
ASL是衡量一个查找算法优劣的重要指标。
定义为:
n是查找表中记录的个数
Pi是查找第i个记录的概率
Ci是找到第i个记录所需进行的比较次数。
静态查找
线性表查找属于静态查找,是将查找表视为一个线性表,将其顺序或链式存储,再进行查找,因此查找思想较为简单,效率不高。如果查找表中的数据元素有一定的规律(如按关键字有序),可以利用这些信息获得较好的查找效率。
顺序查找
即数据存储在顺序表中,然后逐项查找元素。
实现:
#define MAXNUM 100 /*查找表的容量*/
typedef int KeyType;
typedef struct{
KeyType key; /*关键字字段*/
}DataType;
typedef struct{
DataType data[MAXNUM]; /*存储空间*/
int n; /*元素个数*/
}SeqList;
int Seq_Search_1 (SeqList list, KeyType kx)
{/*数据存放在list.data[1] 至list.data[n]中,在表list中查找关键字为kx的数据元素*/
/*若找到返回该元素在查找表中的位置,否则返回0*/
int i=1;
while(i<=list.n && list.data[i].key!= kx )
i++; /* 从表头端向后查找 */
if (i>list.n)
return 0;
else
return i;
}
加监视哨后的顺序查找:
int Seq_Search_2(SeqList list, KeyType kx)
{ /*数据存放在list.data[1] 至list.data[n]中,在表list中查找关键字为kx的数据元素*/
/*若找到返回该元素在查找表中的位置,否则返回0 */
int i;
list.data[0].key=kx;
i=list.n;
while(list.data[i].key!= kx )
i--; /* 从表尾端向前查找 */
return i;
}
比较次数减少了,效率提高。
顺序表上的顺序查找的性能分析
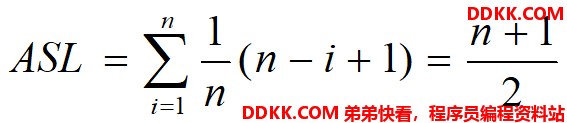
对于n个元素的查找表,若查找的是表中第i个记录时,需进行n-i+1次关键字比较,即ci=n-i+1。
设查找每个元素的概率相等。 查找成功时,顺序查找的平均查找长度为:
查找不成功时,表中每个关键字都要比较一次,直到监视哨,因此关键字的比较次数总是n+1次,显然时间复杂度为O(n)。
顺序查找的特点
- 顺序查找的优点是算法简单,对表中数据元素的存储方式、是否按关键字有序均无要求;
- 缺点是平均查找长度较大,效率低,当n很大时,不宜采用顺序查找。
为了提高查找效率,查找表中的数据存放需依据查找概率越高,使其比较次数越少;查找概率越低,比较次数可相对较多的原则来存储数据元素。
有序表查找
- 有序表是指查找表中的元素按关键字大小有序存储。
- 如果查找表采用顺序结构存储且按关键字有序,那么查找时可采用效率较高的折半查找算法实现。
二分查找(折半查找)
折半查找的思想为:
在有序表中,取中间元素作为比较对象,若给定值与中间元素的关键字相等,则查找成功;若给定值小于中间元素的关键字,则在中间元素的左半区继续查找;若给定值大于中间元素的关键字,则在中间元素的右半区继续查找。不断重复上述查找过程,直到查找成功,或所查找的区域无数据元素,查找失败。
算法实现:
int Binary_Search(SeqList list, KeyType kx)
{ /*数据存放在list.data[1] 至list.data[n]中,在表list中查找关键字为kx的数据元素*/
/*若找到返回该元素在表中的位置,否则返回0 */
int mid,low=1, high=list.n; /*设置初始区间 */
while(low<=high) { /*当查找区间非空*/
mid=(low+high)/2; /*取区间中点 */
if(kx==list.data[mid].key)
return mid; /* 查找成功,返回mid */
else if (kx<list.data[mid].key)
high=mid-1; /* 调整到左半区 */
else low=mid+1; /* 调整到右半区 */
}
return 0; /* 查找失败,返回0 */
}
折半查找的平均查找长度可用判定树来分析
先看一个具体的情况,假设:n=11
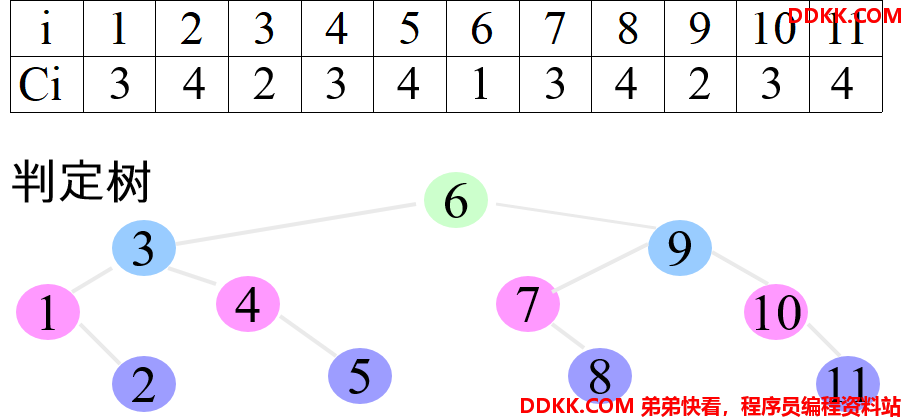
二分查找的效率(ASL)
1次比较就查找成功的元素有1个(20),即中间值;
2次比较就查找成功的元素有2个(21),即1/4处(或3/4)处;
3次比较就查找成功的元素有4个(22),即1/8处(或3/8)处…
4次比较就查找成功的元素有8个(23),即1/16处(或3/16)处…
……
则第h次比较时查找成功的元素会有(2h-1)个;
为方便起见,假设表中全部n个元素= 2h-1个,此时就不讨论第m次比较后还有剩余元素的情况了。

以含n个结点的满二叉树为例(n=2h-1),设查找概率相等,则二分查找的平均查找长度为:
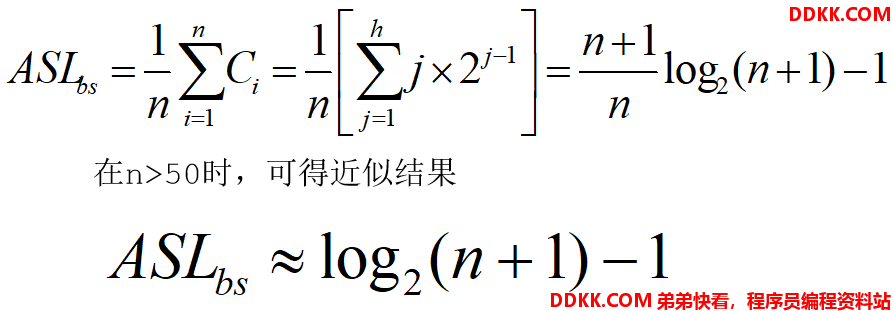
最坏情况下,关键字比较次数为log2(n+1),期望时间复杂度为O(log2n)
折半查找的前提条件是需要有序表顺序存储,对于静态查找表,一次排序后不再发生变化,折半查找能得到不错的效率。但对于需要频繁执行插入或删除操作的数据集来说,维护有序的排序会带来不小的工作量,那就不建议使用。
顺序查找与二分查找的比较
顺序查找:
优点:算法简单,对数据特性无要求;
缺点:ASL大,效率低。
二分查找:
优点:查找速度快,效率高;
缺点:需在有序表上进行,且只限于顺序存储。
插值查找
在介绍插值查找之前,首先考虑一个新问题,为什么上述算法一定要是折半,而不是折四分之一或者折更多呢?
打个比方,在英文字典里面查“apple”,你下意识翻开字典是翻前面的书页还是后面的书页呢?如果再让你查“zoo”,你又怎么查?很显然,这里绝对不会是从中农间开始查起,而是有一定目的的往前或往后翻。
同样的,比如要在取值范围1~10000之间100个元素从小到大均匀分布的数组中查找5,我们自然会从数组下标较小的开始查找。
经过上面的分析,折半查找这种查找方式,不是自适应的(也就是一直保持分半的)。二分查找中查找点计算如下:
mid=(low+high)/2
即
mid=low+(high−low)/2
通过类比,我们可以将查找的点改进为如下:

也就是将上述的比例参数1/2改进为自适应的,根据关键字在整个有序表中所处的位置,让mid值的变化更靠近关键字key,这样也就间接地减少了比较次数。
**基本思想:**基于二分查找算法,将查找点的选择改进为自适应选择,可以提高查找效率。当然,插值查找也属于有序查找。
**注意:**对于表长较大,而关键字分布又比较均匀的查找表来说,插值查找算法的平均性能比折半查找要好的多。反之,数组中如果分布非常不均匀,那么插值查找未必是很合适的选择。
**复杂度分析:**查找成功或者失败的时间复杂度均为O(log2(log2n))。


# 插值查找算法
# 时间复杂度O(log(n))
def binary_search(lis, key):
low = 0
high = len(lis) - 1
time = 0
while low <= high:
time += 1
计算mid值是插值算法的核心代码
mid = low + int((high - low) * (key - lis[low])/(lis[high] - lis[low]))
print("mid=%s, low=%s, high=%s" % (mid, low, high))
if key < lis[mid]:
high = mid - 1
elif key > lis[mid]:
low = mid + 1
else:
打印查找的次数
print("times: %s" % time)
return mid
print("times: %s" % time)
return -1
if __name__ == '__main__':
LIST = [1, 5, 7, 8, 22, 54, 99, 123, 200, 222, 444]
result = binary_search(LIST, 444)
print(result)
View Code
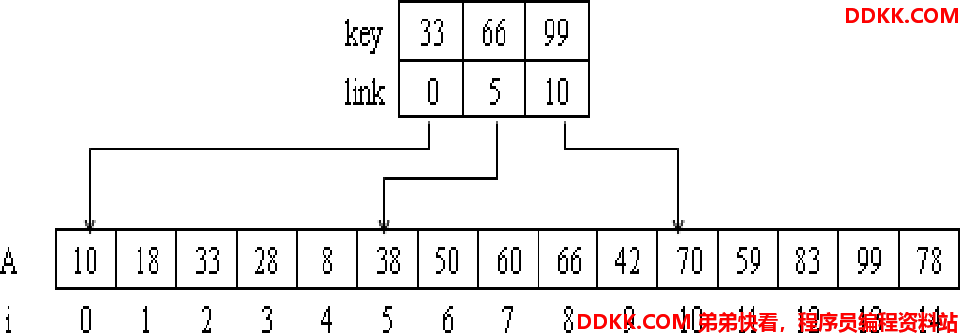
分块查找
分块查找是结合二分查找和顺序查找的一种改进方法。在分块查找里有索引表和分块的概念。
索引表就是帮助分块查找的一个分块依据,其实就是一个数组,用来存储每块的最大存储值,也就是范围上限;分块就是通过索引表把数据分为几块。
基本思想:
1、 把表长为n的线性表分成m块,前m-1块记录个数为t=n/m,第m块的记录个数小于等于t;
2、 在每一块中,结点的存放不一定有序,但块与块之间必须是分块有序的;
3、 为实现分块检索,还需建立一个索引表。索引表的每个元素对应一个块,其中包括该块内最大关键字值和块中第一个记录位置的指针。
在每需要增加一个元素的时候,我们就需要首先根据索引表,知道这个数据应该在哪一块,然后直接把这个数据加到相应的块里面,而块内的元素之间本身不需要有序。因为块内无须有序,所以分块查找特别适合元素经常动态变化的情况。
分块查找只需要索引表有序,当索引表比较大的时候,可以对索引表进行二分查找,锁定块的位置,然后对块内的元素使用顺序查找。这样的总体性能虽然不会比二分查找好,却比顺序查找好很多,最重要的是不需要数列完全有序。
分块有序表的索引存储表示


#include<stdio.h>
#define MAXL 100 //数据表的最大长度
#define MAXI 20 //索引表的最大长度
typedef int keyType;
typedef char infoType[10];
typedef struct
{
keyType key; //KeyType为关键字的数据类型
infoType data; //其他数据
}nodeType;
typedef struct
{
keyType key;
int link; //指向对应块的起始下标
}IdxType;
typedef IdxType IDX[MAXI]; //索引表类型
typedef nodeType seqList[MAXL]; //顺序表类型
int IdxSearch(IDX I, int m, seqList R, int n, keyType k)
{ // 共n个元素, m块
int low=0, high=m-1, mid, i;
int b= n/m; //b为每块的记录个数
while(low<=high) //在索引表中进行二分查找,找到的位置存放在low中
{
mid = (low+high)/2;
if(I[mid].key >= k)
high = mid-1;
else
low = mid+1;
}
//应在索引表的high+1块中,再在线性表中进行顺序查找
i = I[high+1].link; //分块中的起始下标
while(i<=I[high+1].link+b-1 && R[i].key != k) //I[high+1].link+b-1 块长度
i++;
if(i<=I[high+1].link+b-1)
return i+1;
else
return 0;
}
int main()
{
int i,n=25,m=5,j;
seqList R;
IDX I= {{14,0},{34,5},{66,10},{85,15},{100,20}};
keyType a[]= {8,14,6,9,10,22,34,18,19,31,40,38,54,66,46,71,78,68,80,85,100,94,88,96,87};
keyType x=85;
for (i=0; i<n; i++)
R[i].key=a[i];
j=IdxSearch(I,m,R,n,x);
if (j!=0)
printf("%d是第%d个数据\n",x,j);
else
printf("未找到%d\n",x);
return 0;
}
View Code

索引顺序表=索引+顺序表
一般情况下,索引为有序表。 分块查找步骤:
1)由索引确定记录所在区间;
2)在顺序表的某个区间内进行顺序查找。
可见,索引顺序查找的过程也是一个“缩小区间”的查找过程。
分块查找性能分析
分块查找的ASL=查找“索引”的ASL+查找“顺序表”的ASL
设n个数据元素的查找表分为m个子表,且每个子表均为t个元素,即:m*t=n
设在索引表上的检索也采用顺序查找,这样,分块查找的平均查找长度为:

顺序表静态查找方法的比较
在上述3种查找方法中
二分查找具有最高的查找效率,但要求必须是顺序存储结构且元素有序排列,且若要进行插入、删除运算时,因需移动大量元素,运行效率将降低,所以二分查找只适用于有序表的静态查找;
顺序查找效率最低,但对线性表无任何要求——顺序存储或链式存储都可,是否有序都无影响;
分块查找是顺序查找和二分查找的综合。